Path Independence
Definition 1. Let $\mathbf{F}$ be a vector field defined on an open region $D$ in space, and suppose that for any two points $A$ and $B$ in $D$ the line integral $\int_C \mathbf{F} \cdot d \mathbf{r}$ along a path $C$ from $A$ to $B$ in $D$ is the same over all paths from $A$ to $B$. Then the integral $\int_C \mathbf{F} \cdot d \mathbf{r}$ is path independent in $D$ and the field $\mathbf{F}$ is conservative on $D$.
즉 주어진 벡터장의 line integral이 단순히 path의 양 끝점에 의해서만 결정된다면 그 line integral은 path independent하며, 벡터장 $\mathbf{F}$는 conservative, 즉 보존장이라고 부른다. Path independence를 강조하기 위해 종종 $\int_C$ 대신 $\int_A^B$로 쓰곤 한다.
'Conservative'라는 이름은 에너지 보존 법칙에서 따온 것이다. 실제로 위 정의의 조건을 가정할 시 벡터장 $\mathbf{F}$가 정의된 공간에서 물체의 총 에너지는 보존된다.
Potential Function
Definition 2. If $\mathbf{F}$ is a vector field defined on $D$ and $\mathbf{F} = \nabla f$ for some scalar function $f$ on $D$, then $f$ is called a potential function for $\mathbf{F}$.
역시나 물리학의 퍼텐셜 개념에서 따온 이름이다. 중력 퍼텐셜, 탄성 퍼텐셜, 전기 퍼텐셜과 같이 물리학에서 등장하는 수많은 퍼텐셜들은 벡터장 $\mathbf{F}$와 위와 같은 관계를 갖는 스칼라 함수 $f$이다.
Theorem 1
Theorem 1. Let $\mathbf{F}(x, y, z) = \langle M(x, y, z), N(x, y, z), P(x, y, z) \rangle$ be a vector field whose components are continuous throughout an open connected region $D$ in space. Then $\mathbf{F}$ is conservative $\iff$ $\mathbf{F} = \nabla f$ for a differentiable function $f$.
Proof. $(\Longleftarrow)$ By the fundamental theorem of line integral, $\int_C \mathbf{F} \cdot d \mathbf{r}$ depends on the curve's endpoints $A$ and $B$. Hence, $\mathbf{F}$ is conservative. $(\Longrightarrow)$ Suppose that $\mathbf{F}$ is conservative on $D$. We need to show that there is a differentiable function f such that $\mathbf{F} = \nabla f$. Let define $f$ by $$f(x, y, z) = \int_C \mathbf{F} \cdot d \mathbf{r}$$ where $C$ is a smooth path in $D$ from a given point $P_0 = (x_0, y_0, z_0)$ to any other point $P = (x, y, z)$. Since $\mathbf{F}$ is conservative, the value of $f(x, y, z)$ only depends on $P$ and does not depend on the choice of $C$. We divide $C$ by $C = C_1 \cup L$ where $C_1$ is a smooth path from $P_0$ to $P_1 = (x_0, y, z)$ and $L$ is a line segment from $P_1$ to $P$. Then, we have $$\frac{\partial f}{\partial x} = \frac{\partial}{\partial x} \int_C \mathbf{F} \cdot d \mathbf{r} \\ = \frac{\partial}{\partial x} \left( \int_{P_0}^{P_1} \mathbf{F} \cdot d \mathbf{r} + \int_{P_1}^P \mathbf{F} \cdot d \mathbf{r} \right) = \frac{\partial}{\partial x} \int_{P_1}^P \mathbf{F} \cdot d \mathbf{r} \\ = \frac{d}{dx} \int_{x_0}^x M(t, y, z) dt = M(x, y, z)$$ because $L$ can be parametrized by $\mathbf{r}(t) = \langle t, y, z \rangle, x_0 \leq t \leq x$. Then $$\frac{\partial f}{\partial x} = M(x, y, z)$$ and in the same manner, we can show that $$\frac{\partial f}{\partial y} = N(x, y, z) \quad \text{ and } \quad \frac{\partial f}{\partial z} = P(x, y, z).$$ Thus $\mathbf{F} = \nabla f$. $\blacksquare$
증명의 핵심은 $\mathbf{F}$의 line integral을 항상 우리가 원하는 특정 축 $x, y, z$ 성분으로 쪼개볼 수 있다는 것이다. 결국 gradient $f$도 $f$의 미분이므로, single variable의 기억을 떠올리면 $f$를 $\mathbf{F}$의 적분 꼴로 두는 게 타당하다. 그런데 이 $\mathbf{F}$의 line integral을 특정 축 성분으로, 다시 말해 우리가 원하는 변수 부분만 쏙 분리해 놓을 수 있으니 partial derivative를 쉽게 구해낼 수 있다는 것이다.
Theorem 2
Theorem 2. The field $\mathbf{F}$ is conservative on $D$ $\iff$ $\oint_C \mathbf{F} \cdot d \mathbf{r} = 0$ around every loop in $D$.
Proof. $(\Longrightarrow)$ By theorem 2, there is a differentiable function $f$ such that $\mathbf{F} = \nabla f$. Then, by the fundamental theorem of line integral, $\oint_C \mathbf{F} \cdot d \mathbf{r} = f(A) - f(A) = 0$ where $A$ is any point in a loop in $D$.
$(\Longleftarrow)$ Take any two distinct points $A$ and $B$ in $D$. Suppose that $\mathbf{F}$ is not conservative on $D$, which means that $\int_{C_1} \mathbf{F} \cdot d \mathbf{r} \neq \int_{C_2} \mathbf{F} \cdot d \mathbf{r}$ for two different smooth curves $C_1$ and $C_2$ from $A$ to $B$.
We have the loop $C_1 \cup (-C_2)$ where $-C_2$ is the curve tracing $C_2$ reversely. Then $$\oint_C \mathbf{F} \cdot d \mathbf{r} = \int_{C_1} \mathbf{F} \cdot d \mathbf{r} + \int_{-C_2} \mathbf{F} \cdot d \mathbf{r} \\ \int_{C_1} \mathbf{F} \cdot d \mathbf{r} - \int_{C_2} \mathbf{F} \cdot d \mathbf{r} = 0 \\ \Longrightarrow \int_{C_1} \mathbf{F} \cdot d \mathbf{r} = \int_{C_2} \mathbf{F} \cdot d \mathbf{r}. \quad \bigotimes$$ Thus $\mathbf{F}$ is conservative on $D$. $\blacksquare$
따라서 theorem 1, 2에 의해 벡터장 $\mathbf{F}$는 보존장이다, 폐곡선에 대한 line integral이 0이다, 퍼텐셜 함수가 존재한다는 세 개의 명제는 모두 동치이다.
Theorem 3
Theorem 3. Let $f(x, y, z)$ be a scalar function whose second partial derivatives are continuous. Then $$\nabla \times \nabla f = \mathbf{0}.$$
Proof. $$\nabla \times \nabla f = \begin{vmatrix} \mathbf{i} & \mathbf{j} & \mathbf{k} \\ \partial_x & \partial_y & \partial_z \\ \partial_x f & \partial_y f & \partial_z f \end{vmatrix} = \langle \partial_{zy} f - \partial_{yz}, \partial_{xz} f - \partial_{zx} f, \partial_{yx} f - \partial_{xy} f.$$ If the second partial derivatives are continuous, the mixed second derivatives in parentheses are equal and the vector is zero. $\blacksquare$
만약 벡터장 $\mathbf{F}$가 보존장이라고 하자. 그러면 퍼텐셜 함수 $f$가 존재하므로 $\nabla \times \mathbf{F} = \nabla \times \nabla f = \mathbf{0}$이다. 즉 보존장은 회전하지 않는다.
Theorem 4
Theorem 4. If $\nabla \times \mathbf{F} = \mathbf{0}$ at every point of a simply connected open region $D$ in space, then on any piecewise-smooth closed path $C$ in $D$, $$\oint_C \mathbf{F} \cdot d \mathbf{r} = 0.$$
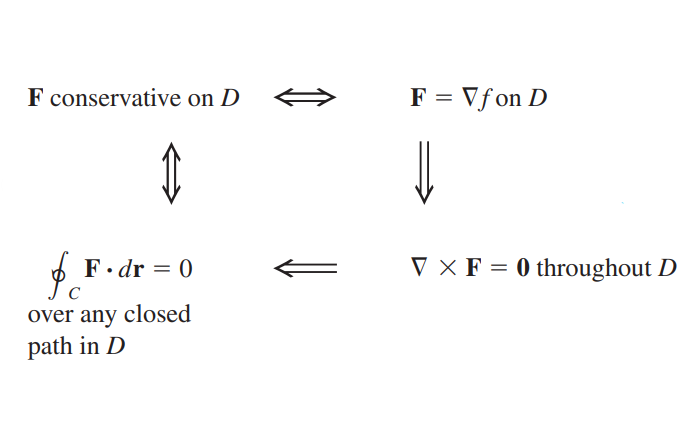
Theorem 1~4의 내용을 요약하면 다음과 같다.